いよいよ今週26日から発表会が始まります。 今日はその発表会前の授業となるため、 発表練習をみんなで行いました。 自分の発表をするだけではなく、 他の人の発表を聞いて、 さまざまな質問が出たり、意見交換をしていました。 …
クレファスの各コースでは11月下旬に行われる発表会に向けて、 資料作成、発表練習が続いています。 模造紙やプレゼンテーションソフトを使って 人前で発表することが初めての人が多く、 不安と期待が入り混じった様子です。 さて…
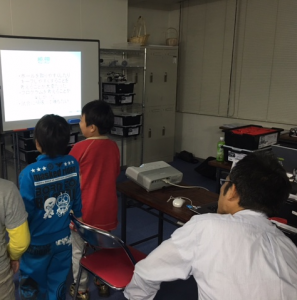
自分の考えをプログラミングを通して ロボットに伝えることは、論理的な思考力を 育む!・・・・ということが教室内で 毎回実践されています。 自分のイメージとロボットの実際の動き、 「何かちがうなぁ。どうすればいいのかな?」…

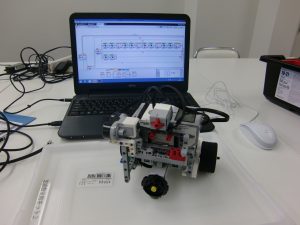
世界標準のロボット教材レゴ®マインドストーム®EV3で 製作した自慢の「サッカーロボット」 光センサー、タッチセンサー、超音波センサー、 分岐プログラムなど実に様々な工夫・思考錯誤が このロボットにはあります。 自慢のサ…

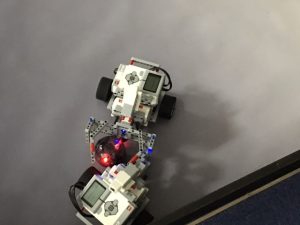
発表会に向けてみんなで協力しながら ロボット製作&プログラミングの工夫を しています。 お互いのアイデアの素晴らしい所を 取り入れ、さらに良いものを製作しています。 皆で発表会を成功させようね!!

ロボットを使ったサッカーの試合に向け、 今日はフォワード用ロボットの頭にタイヤをつけて、 その頭につけたタイヤもモーターで回転させて、 ボールを運べるようにしました。 ボールを見つけ、ドリブル成功! かと思ったものの、様…

今日は、ギアを変えて走らせるロボットを作りました。 モーター側、タイヤ側の順に 小ギアと大ギア、中ギア同士、大ギアと小ギア と組み合わせを変えて、 速さ、トルクの強さがどのように変わるのか確かめます。 小ギアと大ギアの組…
サッカーロボットの製作を始めました。 まずはボールを見つけることからです。 周辺の明るさとボールが放つ光の明るさを比較して ボールを探します。 ボールを探している時と、見つけた後の動きをそれぞれプログラミングすることで …
カラーセンサーでは、その取り付け方によって取得できる値がかわります。 遠すぎても、近すぎてもいけません。 キットの部品を組み付けなおし、ためしながら そして見た目のかっこよさも少し気にしながら 最適な取り付け位置を決めて…

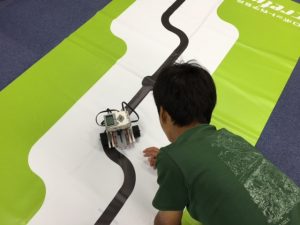
カラーセンサーの反射光の強さを取得する機能を使って 黒い線に沿ってロボットを走らせるライントレースに 挑戦しました。 カラーセンサーから取得する値からどのように動作させるか考え、 プログラミングし、実際に走らせてみて、そ…