基礎を積み重ねながら1年のカリキュラムごとにステップアップしていきます。
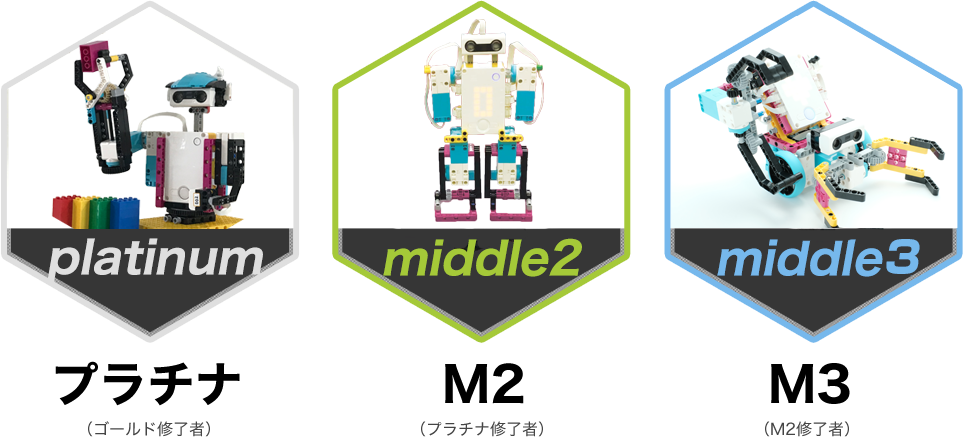
ゴールド(Gold)コースを修了した方には、さらに上級コースをご用意しております!
多種のギアを組み合わせたり、センサーを使うことで、
ロボットの基礎を学びます!
PCの基本操作/プログラミング入門/ロボットの動き/ロボット制御/プログラムのループ/プログラムの保存/ギアダウンロボットの製作/クレーンロボット制御/タッチセンサーの働き/光センサーの働き/センサーを使ったプログラミング/ライントレースの考え方/ベルト駆動の特性を調べる/ギアの働き/ギアの組合せと速さ/てこの働き/滑車の働き/速度計測と表やグラフの作成
ポスタープレゼンテーション/競技用ロボットの製作
様々なセンサーを使用したロボット製作の応用を身に付けます!
PCの基本操作/初級プログラミング/信地回転と超信地回転/無限ループの概念/ロボットデザイン/ダンスロボットの製作/タッチセンサーの働き/光センサーの働き/超音波センサーの働き/センサー応用のプログラミング/回転センサーのプログラミング/回転運動を往復運動に変える仕組み/ギアの働き/てこの働き/計測した数値を表にまとめる/分岐の考え方
プレゼンテーションの作成/競技用ロボットの製作
複数のセンサーを同時に制御した高度なプログラミングを学びます!
PCの基本操作/中級プログラミング/無限ループの概念/タイマー制御/複数の条件分岐の優先順位とプログラミング/ローマ字学習/キーボードとタイピングの学習/光センサー等各種センサー制御/角度センサーのプログラミング
プレゼンテーションの作成/競技用ロボットの製作
ゴールド(Gold)コース修了した方は、
以下の上級コースをご用意しております!
様々なセンサーを使用したロボット製作の応用を身に付けます!

「変数」を学んでいきます。ロボットが自分の持っているセンサーで測った値を自分で覚えておくことができるようになります。そうするとロボットがどんな道をたどっても迷子にならずきちんと戻るといったこともできるようになります。
またプログラムが複雑になりすぎないよう、繰り返し出てくる操作や意味の似ている動作をひとまとめにして分かりやすくする「サブルーチン」を使っていきます。プログラムの容量を減らし、分かりやすくすることができます。
「ステアリングカー」を作ります。普段目にしている自動車の駆動構造に近いロボットになり、各種センサーを搭載した「ステアリングカー」を用いて「データロギング」に挑戦します。
センサーが読み取った数値をPCに送り、どんな環境下にロボットがいるのか、どんな物体がロボットの目の前にあるのかを探っていきます。ヒトが存在することのできない環境下(火星など)での探索といった最先端のロボットの活躍を再現してもらいます。
また無線通信技術の一つであるBluethoothについて学び、「ステアリングカー」をオリジナルリモコンで動く「ステアリング&ラジコンカー」に改良していきます。
そしてついに「二足歩行ロボット」の作製に挑戦します。ヒトの「二足で歩く」という機能がどれほど高度なものなのか、驚嘆すること間違いなしです。
世界的に人気のあるプログラミング言語「Python」でのプログラミングを行い、総仕上げとして学習内容を組み合わせた総合課題に挑戦します。
これまでのグラフィカルなプログラミングから、テキストベースのプログラミングを学習することで、プログラミングの基本構造を段階的に理解していきます。
また、ジャイロセンサーを用いてセンサーの校正の仕方について学びます。

今までにプログラミングの仕組みを学んできているのでスムーズな理解のもと、本格的にキーボードでテキストを打つことでプログラミングをしていくことになります。
「Python」を使うことでより細かくロボットの動きを制御できるようになり、1/1000秒単位での動きの指定も可能になります。過去に行わせたロボットの動きも「Python」で行わせるとまた一味違ったものになってきます。
| クラス | ブロンズ | シルバー | ゴールド |
| 対象年齢 | 小学3年生 | 小学4年生 | 小学5年生~中学3年生 |
|---|---|---|---|
| 曜日・時間 | 各教室により異なります。詳しくはこちらから! | ||
| 定員 | 1クラス6名 | ||
| 受講回数 | 4月から始まる1年間のカリキュラムを組んでおり、1回90分、年42回の授業です。 | ||
| 使用キット | 教育版レゴ®Spikeプライムセット |
||
教育版レゴ®Spikeプライム拡張セット |
|||
| 費用 | 入会金:15,000円(税込:16,500円) |
入会金:15,000円(税込:16,500 円) |
入会金:15,000円(税込:16,500 円) |
キット代:別途必要 |
|||
| クラス | ブロンズ |
| 対象 年齢 |
小学3年生 |
|---|---|
| 曜日 時間 |
各教室により異なります。 詳しくはこちらから! |
| 定員 | 1クラス6名 |
| 受講 回数 |
4月から始まる1年間のカリキュラムを組んでおり、1回90分、年42回の授業です。 |
| 使用 キット |
教育版レゴ®Spikeプライムセット |
| 費用 | 入会金:16,500円 |
キット代:別途必要 |
| クラス | シルバー |
| 対象 年齢 |
小学4年生 |
|---|---|
| 曜日 時間 |
各教室により異なります。 詳しくはこちらから! |
| 定員 | 1クラス6名 |
| 受講 回数 |
4月から始まる1年間のカリキュラムを組んでおり、1回90分、年42回の授業です。 |
| 使用 キット |
教育版レゴ®Spikeプライムセット |
教育版レゴ®Spikeプライム拡張セット |
|
| 費用 | 入会金:16,500円 |
| キット代:別途必要 ※表示価格は、全て税込価格です。 |
| クラス | ゴールド |
| 対象 年齢 |
小学5年生~中学3年生 |
|---|---|
| 曜日 時間 |
各教室により異なります。 詳しくはこちらから! |
| 定員 | 1クラス6名 |
| 受講 回数 |
4月から始まる1年間のカリキュラムを組んでおり、1回90分、年42回の授業です。 |
| 使用 キット |
教育版レゴ®Spikeプライムセット |
教育版レゴ®Spikeプライム拡張セット |
|
| 費用 | 入会金:16,500円 |
| キット代:別途必要 ※表示価格は、全て税込価格です。 |

crefusでは、発表会を通じてプレゼンテーション手法も学びます。
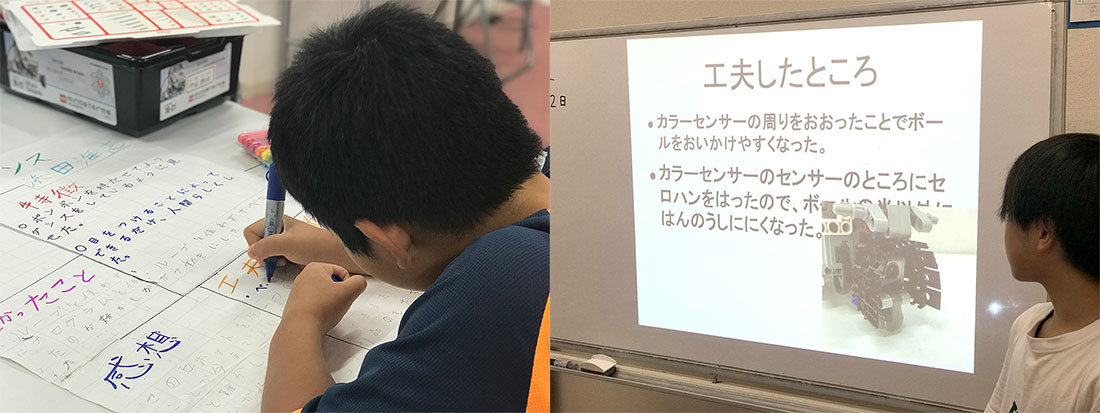
年に2回、前期・後期の発表会があり、本格的なプレゼンテーション能力を身につけます。 これまでに作ってきたロボットについて、ポスターやPowerPointを利用して発表を行い、自分の考えをスムーズに周りに伝える力、表現力を養います。