



ビギナーズコースを修了した方は、
さらに上級コースをご用意しております

| 学習・習得領域 |
|---|
| ・正負の数 ・一次関数の基礎 ・平面図形の運動による 空間図形の構成と展開 ・運動の速さと向き ・ワードとエクセルの基本操作 ・テコや滑車の応用 ・樹形図 ・条件分岐 ・変数の考え方と使い方 |
| 学習・習得領域 |
|---|
| ・情報通信 ・計測工学 ・運動力学 ・システム制御工学 ・条件分岐 ・変数の考え方と使い方 |

| 学習・習得領域 |
|---|
| ・開発言語(ロボットC) ・論理演算 ・制御工学 ・微分・積分 ・計測工学 |
「変数」を学んでいきます。ロボットが自分の持っているセンサーで測った値を自分で覚えておくことができるようになります。そうするとロボットがどんな道をたどっても迷子にならずきちんと戻るといったこともできるようになります。
またプログラムが複雑になりすぎないよう、繰り返し出てくる操作や意味の似ている動作をひとまとめにして分かりやすくする「サブルーチン」を使っていきます。プログラムの容量を減らし、分かりやすくすることができます。
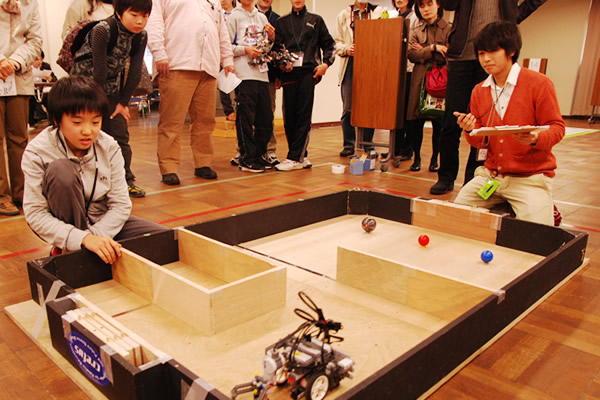
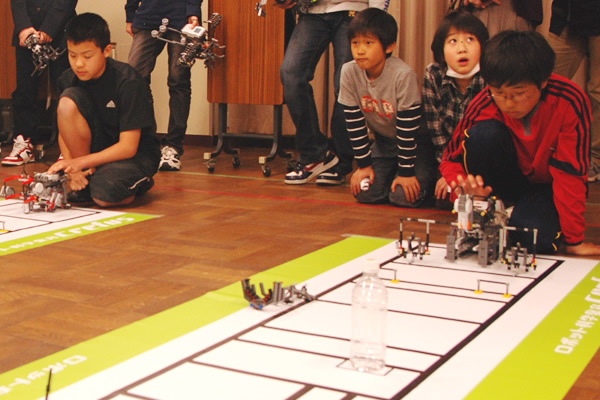
さらに新しく「IRシーカー」という赤外線を発する物体の位置を知ることのできる優れたセンサーについて学びます。その上で「変数」「サブルーチン」「IRシーカー」を使い、トレジャーハントロボットを作り上げます。赤外線を発する球をトレジャー(お宝)に見立て、迷路を抜けた先の球を捕まえ、スタート地点まで戻る歯ごたえのある競技です。見事お宝をゲットして帰還するロボットを君は作れるかな?
「ステアリングカー」を作ります。普段目にしている自動車の駆動構造に近いロボットになります。そして各種センサーを搭載した「ステアリングカー」を用い、「データロギング」に挑戦します。
センサーが読み取った数値をPCに送り、どんな環境下にロボットがいるのか、どんな物体がロボットの目の前にあるのかを探っていきます。ヒトが存在することのできない環境下(火星など)での探索といった最先端のロボットの活躍を、皆さんにも再現してもらいます。また無線通信技術の一つであるBluethoothについて学び、「ステアリングカー」をオリジナルリモコンで動く「ステアリング&ラジコンカー」に改良していきます。
そしてついに「二足歩行ロボット」の作製に挑戦します。ヒトの「二足で歩く」という機能がどれほど高度なものなのか、驚嘆すること間違いなしです。
最もポピュラーなコンピュータ言語の1つに数えられる「C言語」を使っていきます。本格的にキーボードでテキストを打つことでプログラミングをしていくことになります。今までにプログラミングの仕組みを学んできているのでスムーズに理解できます。
「C言語」を使うことでより細かくロボットの動きを制御できるようになります。1/1000秒単位での動きの指定も可能になります。Crefusの教室で過去に行わせたロボットの動きも「C言語」で行わせるとまた一味違ったものになってきます。
また「傾き」や「角速度」を測定できる「ジャイロセンサー」を用い、不安定な土台でもボールを落とさない「配膳ロボット」を作ってみたり、きれいに区画整備されたビル街を模したフィールドを指定された方法で走り抜ける「シティエンバイロメントロボット」など、ロボット製作の楽しみももちろんあります。
世界の教育現場で認められているレゴ®マインドストーム®EV3を使用。プログラムはアイコンを画面上にドラッグ&ドロップするだけで完了。直感的なプログラムにより初心者でも簡単にプログラミングを体験できます。 もちろん詳細な設定や複雑な組み合わせにより高度なプログラムによる計測と制御も可能です。科学実験や設計のテストの際に必要な数値データの予測、計測、収集、分析をEV3ソフトウェアでは行うことができます。計測した数値の理解をより深められ、身近に感じられます。あらゆるユーザーのレベルや用途に対応できるソフトウェアデザインを実現しました。




